
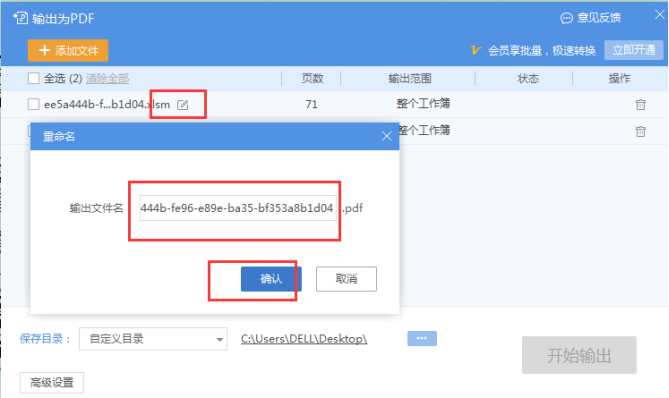
输出PDF,怎么设置像以前老版本那边在输出前,更改文件名,再退出
1884
2022-05-30

一. 异常向量表
1. 异常相关概念
(1) 异常
(2) 异常类型简介
2. 异常处理
(1) 异常处理
二. 异常向量表代码编写
1. 初始化异常向量表模块代码
2. 链接器脚本
3. Makefile 编译脚本
4. 编译输出可执行文件
本博客的参考文章及相关资料下载 :
1.ARM 架构参考手册 ( ARM Architecture Reference Manual ) :
https://download.csdn.net/download/han1202012/8324641
2.汇编参考手册 :
https://download.csdn.net/download/han1202012/8328375
3.本博客代码下载 :
https://download.csdn.net/download/han1202012/10392901
一. 异常向量表
参考手册 :
1.异常向量表手册位置
:
ARM Architecture Reference Manual A2.6
;
2.ARM Architecture Reference Manual 文档-
:
http://download.csdn.net/detail/han1202012/8324641
;
1. 异常相关概念
(1) 异常
")
异常定义 :
1.异常简介 : 由于
内部或者外部的一些事件
, 导致
处理器停下正在处理的工作, 转而去处理这些发生的事
;
2.处理器状态 : 当遇到异常的时候, 先将
处理器状态保存起来
, 以便执行完异常处理程序后, 可以
恢复处理器状态, 继续执行异常出现点下面的代码
;
3.异常同时出现 : 在
一个时间点 可以出现 多个异常
;
4.异常向量概念 :
当异常发生的时候, 程序被强行从一个固定的内存地址执行,
每个种类的异常都有对应的一固定内存地址
, 这个内存地址就是异常向量
;
(2) 异常类型简介
异常类型 : ARM 架构 支持 七种类型的异常,
1.Reset : 处理器在工作时, 突然
按下重启键, 就会触发该异常
;
2.Undefined instructions : 处理器
无法识别指令的异常
, 处理器执行的指令是有规范的, 如果 尝试执行 不符合要求的指令, 就会进入到该异常指令对应的地址中;
3.Software interrupt (SWI) :
软中断
, 软件中需要去打断处理器工作, 可以使用软中断来执行 ;
4.Prefetch Abort (instruction fetch memory abort) :
预取指令失败
, ARM 在执行指令的过程中, 要先去预取指令准备执行, 如果预取指令失败, 就会产生该异常;
5.Data Abort (data access memory abort) :
读取数据失败
;
6.IRQ (interrupt) :
普通中断
;
7.FIQ (fast interrupt) :
快速中断
, 快速中断要比普通中断响应速度要快一些;
2. 异常处理
(1) 异常处理
异常处理简介 :
1.异常向量工作机制 : 异常发生时, ARM 处理器会
跳转到对应该异常的 固定地址 去执行异常处理程序
, 这个
固定的地址
就是异常向量;
2.默认地址 和 高位地址 : 每个中断类型对应两个异常向量, 默认是
Normal address
, 如果经过配置, 配置使用高位的异常向量, 就会使用
High vector address
异常向量; 使用 普通 向量 还是 高位向量, 可以使用 CP15 协处理器进行配置;
3.异常 与 地址 一一对应 : 每个异常都
对应着一个地址
, 出现指定类型的异常时, 就会跳转到该异常对应的地址执行异常处理程序;
4.注意异常向量断点 ( 保留位 ) :
普通向量 ( Normal Vector ) 地址 0x00000014
和
高位向量 ( High Vector ) 地址 0xFFFF0014
暂时没有使用, 为今后的扩展保留;
二. 异常向量表代码编写
1. 初始化异常向量表模块代码
Start.S 汇编程序解析 :
1.汇编参考文章 : https://blog.csdn.net/shulianghan/article/details/42408137 ;
2.汇编参考手册- : https://download.csdn.net/download/han1202012/8328375
3.指明汇编代码段 : 使用 .text 宏 指明汇编代码段;
4.标明程序入口标号 : 先使用 .global _start
将 _start 声明成全局符号
; 使用 _start:
标明程序的入口标号是 _start
;
5.定义标号( 类似于函数名 ) : 定义自定义标号, 格式 标号:, 例如 irq:;
( 1 ) 定义标号执行的指令 :
标号下面定义要执行的指令
,
如果想要执行标号下面的指令, 直接跳转到对应标号即可
;
( 2 ) 异常执行的代码内容 : 在下面代码的 27 ~ 49 行就是
定义了 7 个异常执行操作的 标号
以及要执行的指令 nop; 这些都是
异常发生的时候要处理的代码
;
( 3 ) 代码示例 : 下面代码定义了一个 irq 标号, 跳转到该标号即开始执行标号下的代码 nop, irq : nop;
6.空操作 : 如果在某个位置执行指令, 不想做任何操作, 可以使用 nop 表示
什么操作都不执行
;
7.定义标号 ( 类似于变量 ) : 定义一个标号, 在标号中存放 32 位的值, 定义格式 标号: .word 存储值的内容;
( 1 ) 示例 : _irq: .word irq, 定义 _irq 标号, .word 表示该标号存储的是 32 位值, 这个值的大小就是 irq 地址;
8.分支指令 : 当异常发生的时候, 需要跳转到对应的异常处理指令中;
( 1 ) 分支指令语法格式 : b{条件} 地址, 如果
①满足条件, 就跳转到 地址 位置
, 如果
②不满足条件, 就执行下面的语句
,
③如果没有条件, 就是 100% 执行
;
( 2 ) 代码示例 : b reset, 异常发生时, 直接跳转到 reset 标号处执行代码;
9.装载指令 :
( 1 ) 装载指令语法格式 : ldr 寄存器, 地址, 将 地址 中存放的数据 装载 到 寄存器中;
( 2 ) 代码示例 :
a.定义标号 ( 函数 ) :
定义要执行的指令的标号
irq , 即跳转到该标号处, 就开始执行标号下面的指令, irq : nop ;
b.定义标号 ( 变量 ) : 定义一个标号 _irq , 用于
存放一个 32 位的值
, 这里用于存放 上面 定义的标号 地址, _irq .word irq
c.装载地址到 pc 寄存器 : ldr pc, _irq, 将 _irq 标号中存放的值, 这个值是 irq 标号的地址, 就是
跳转到该地址去执行指令
;
10.完整汇编代码示例 :
@**************************** @File:start.S @ @异常处理框架 @**************************** .text @ 宏 指明代码段 .global _start @ 伪指令声明全局开始符号 _start: @ 程序入口标志 b reset @ reset 复位异常 ldr pc, _undefined_instruction @ 未定义异常, 将 _undefined_instruction 值装载到 pc 指针中 ldr pc, _software_interrupt @ 软中断异常 ldr pc, _prefetch_abort @ 预取指令异常 ldr pc, _data_abort @ 数据读取异常 ldr pc, _not_used @ 占用 0x00000014 地址 ldr pc, _irq @ 普通中断异常 ldr pc, _fiq @ 软中断异常 _undefined_instruction: .word undefined_instruction @ _undefined_instruction 标号存放了一个值, 该值是 32 位地址 undefined_instruction, undefined_instruction 是一个地址 _software_interrupt: .word software_interrupt @ 软中断异常 _prefetch_abort: .word prefetch_abort @ 预取指令异常 处理 _data_abort: .word data_abort @ 数据读取异常 _not_used: .word not_used @ 空位处理 _irq: .word irq @ 普通中断处理 _fiq: .word fiq @ 快速中断处理 undefined_instruction: @ undefined_instruction 地址存放要执行的内容 nop software_interrupt: @ software_interrupt 地址存放要执行的内容 nop prefetch_abort: @ prefetch_abort 地址存放要执行的内容 nop data_abort: @ data_abort 地址存放要执行的内容 nop not_used: @ not_used 地址存放要执行的内容 nop irq: @ irq 地址存放要执行的内容 nop fiq: @ fiq 地址存放要执行的内容 nop reset: @ reset 地址存放要执行的内容 nop
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
2. 链接器脚本
gboot.lds 链接器脚本 代码解析 :
1.指明输出格式 ( 处理器架构 ) : 使用 OUTPUT_ARCH(架构名称) 指明
输出格式, 即处理器的架构
, 这里是 arm 架构的, OUTPUT_ARCH(arm) ;
2.指明输出程序的入口 : 设置编译输出的程序入口位置, 语法为 ENTRY(入口位置), 在上面的 Start.S 中设置的程序入口是 _start, 代码为 ENTRY(_start) ;
3.设置代码段 : 使用 .text : 设置代码段;
4.设置数据段 : 使用 .data : 设置数据段;
5.设置 BSS 段 : 使用 .bss : 设置 BSS 段;
( 1 ) 记录 BSS 段的起始地址 : bss_start = .; ;
( 2 ) 记录 BSS 段的结束地址 : bss_end = .; ;
6.对齐 : 每个段都需要设置内存的对齐格式, 使用 . = ALIGN(4); 设置四字节对齐即可;
7.代码示例 :
OUTPUT_ARCH(arm) /*指明处理器结构*/ ENTRY(_start) /*指明程序入口 在 _start 标号处*/ SECTIONS { . = 0x50008000; /*整个程序链接的起始位置, 根据开发板确定, 不同开发板地址不一致*/ . = ALIGN(4); /*对齐处理, 每段开始之前进行 4 字节对齐*/ .text : /*代码段*/ { start.o (.text) /*start.S 转化来的代码段*/ *(.text) /*其它代码段*/ } . = ALIGN(4); /*对齐处理, 每段开始之前进行 4 字节对齐*/ .data : /*数据段*/ { *(.data) } . = ALIGN(4); /*对齐处理, 每段开始之前进行 4 字节对齐*/ bss_start = .; /*记录 bss 段起始位置*/ .bss : /*bss 段*/ { *(.bss) } bss_end = .; /*记录 bss 段结束位置*/ }
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
3. Makefile 编译脚本
makefile 文件编写 :
1.通用规则 ( 汇编文件编译规则 ) :
汇编文件 编译 成同名的 .o 文件
, 文件名称相同, 后缀不同, %.o : %.S, 产生过程是 arm-linux-gcc -g -c $^ , 其中 ^ 标识是所有的依赖文件, 在该规则下 start.S 会被变异成 start.o ;
2.通用规则 ( C 文件编译规则 ) : C 代码编译成同名的 .o 文件, %.o : %.c , 产生过程是 arm-linux-gcc -g -c $^ ;
3.设置最终目标 : 使用 all: 设置最终编译目标;
( 1 ) 依赖文件 :
产生最终目标需要依赖 start.o 文件
, 使用 all: start.o 表示最终目标需要依赖该文件;
( 2 ) 链接过程 : arm-linux-ld -Tgboot.lds -o gboot.elf $^, 需要使用链接器脚本进行连接,
①链接工具是 arm-linux-ld 工具
,
②使用 -Tgboot.lds 设置链接器脚本 是刚写的 gboot.lds 链接器脚本
,
③输出文件是 gboot.elf 这是个中间文件
,
④ 依赖文件是 $^ 代表所有的依赖
;
( 3 ) 转换成可执行二进制文件 : arm-linux-objcopy -O binary gboot.elf gboot.bin, 使用 -O binary 设置输出二进制文件, 依赖文件是 gboot.elf, 输出的可执行二进制文件 即 结果是 gboot.bin ;
4.makefile 文件内容 :
all: start.o #依赖于 start.o arm-linux-ld -Tgboot.lds -o gboot.elf $^ #使用链接器脚本, 将 start.o 转为 gboot.elf arm-linux-objcopy -O binary gboot.elf gboot.bin #将 gboot.elf 转化为可以直接在板子上执行的 gboot.bin 文件 %.o : %.S #通用规则, 如 start.o 是由 start.S 编译来的, -c 是只编译不链接 arm-linux-gcc -g -c $^ %.o : %.c #通用规则, 如 start.o 是由 start.c 编译来的, -c 是只编译不链接 arm-linux-gcc -g -c $^ .PHONY: clean clean: #清除编译信息 rm *.o *.elf *.bin
1
2
3
4
5
6
7
8
9
10
11
12
13
4. 编译输出可执行文件
编译过程 :
1.文件准备 : 将 汇编代码 ( start.S ) 链接器脚本 ( gboot.lds ) makefile 文件 拷贝到编译目录 ;
2.执行编译命令 : make ;
3.编译结果 : 可以看到 生成了 编译目标文件 start.o, 链接文件 gboot.elf, 可执行的二进制文件 gboot.bin ;
本博客的参考文章及相关资料下载 :
1.ARM 架构参考手册 ( ARM Architecture Reference Manual ) :
https://download.csdn.net/download/han1202012/8324641
2.汇编参考手册 :
https://download.csdn.net/download/han1202012/8328375
3.本博客代码下载 :
https://download.csdn.net/download/han1202012/10392901
ARM 嵌入式 汇编语言
版权声明:本文内容由网络用户投稿,版权归原作者所有,本站不拥有其著作权,亦不承担相应法律责任。如果您发现本站中有涉嫌抄袭或描述失实的内容,请联系我们jiasou666@gmail.com 处理,核实后本网站将在24小时内删除侵权内容。



